
球体
球体就是一个球体网格模型,通过程序自动创建,无需建模。
1. 基础设置
| 配置项 | 说明 |
|---|---|
| 选择原点 | 选择球体位置根据哪一个原点的经纬度决定。 |
| 是否显示 | 即该球体在鲸孪生组件中的显示与隐藏。 |
| 仅在夜晚显示 | 按钮开启后,球体仅在场景设置时间的晚上进行显示。 |
| 跟随路径旋转 | 当为球体添加了路径动画后,播放动画时,球体会沿着路径运动并进行旋转。 |
| 是否可选中 | 即鼠标点击该球体时的选中效果,按钮开启后可设置选中是否高亮以及高亮颜色。 |
| 位置 | 即该球体被放置在鲸孪生组件中的三维空间位置,是基于原点的坐标。 |
| 旋转 | 三维空间旋转可以输入任意数值,数值对应角度向X 轴/Y 轴旋转。 |
| 缩放 | 即更改球体的大小,使其相对于原尺寸变大或变小的过程。 |
| 画面外渲染 | 即将球体内容在没有直接显示给用户的情况下进行渲染。 |
| 转向相机 | 有三种转向方式:“不转向相机”、“永远面向相机”和“垂直转向相机”。 |
| 产生阴影/接受阴影 | 产生阴影是指该物体可以在阳光下差生阴影,接受阴影指阴影可以投射在此物体上。 |
| 不透明度(%) | 该设置项的一个常见用法是结合条件样式/交互/多状态来实现模型的显示和隐藏。 |
| 使用顶点颜色 | 开启后可以让球体表面颜色与顶点颜色一致。 |
| alphalndex | 指透明物体的显示层级。 |
| 碰撞检测 | 与第一人称相机之间的碰撞检测。 |
| 设置反射厚度 | 可以自定义反射厚度的数值,反射厚度是控制 SSR 的一个参数,默认值为**“10” ** 。 |
| VR 地面 | 开启后,在 VR 环境下视作地面,默认关闭。 |
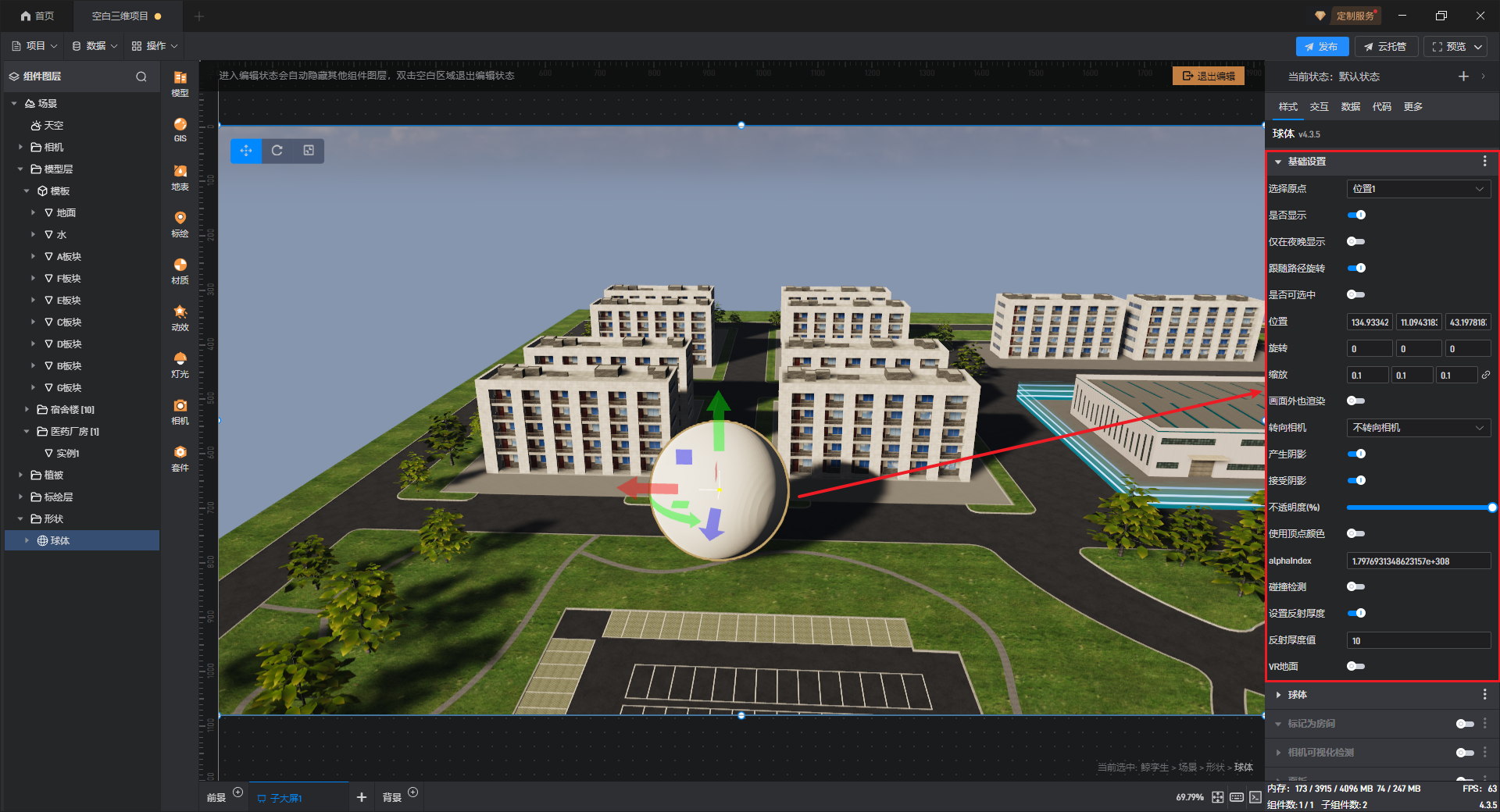
球体 基础设置如下图所示:
球体 打开跟随路径旋转,效果如下图所示:
球体 不透明度(%)变化,如下图所示:
2. 球体
| 配置项 | 说明 |
|---|---|
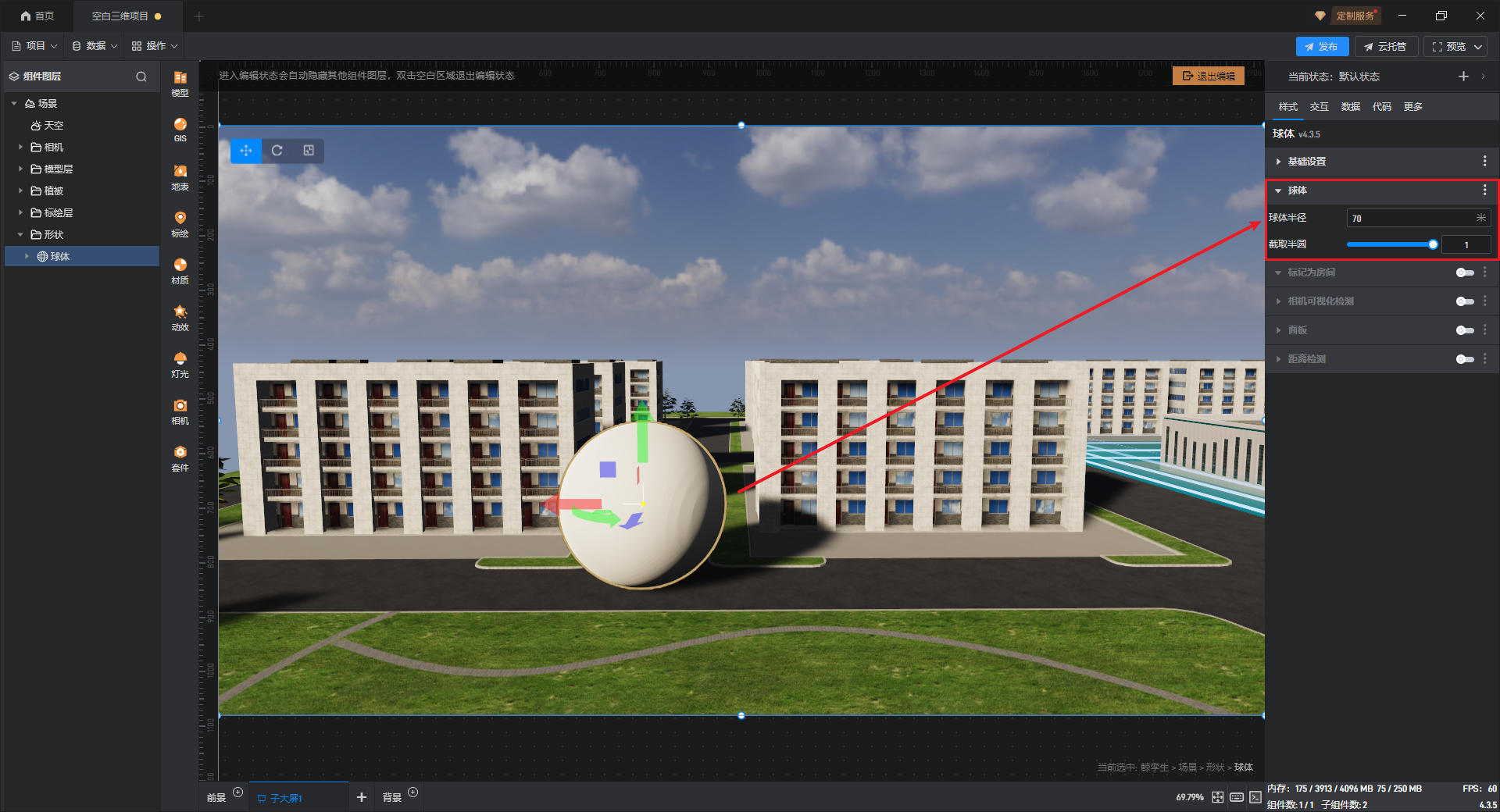
| 球体半径 | 这个球体的半径大小,单位为米。 |
| 截取半圆 | 只留取圆的一部分,范围为“0~1”,值越大,保留的部分越多。 |
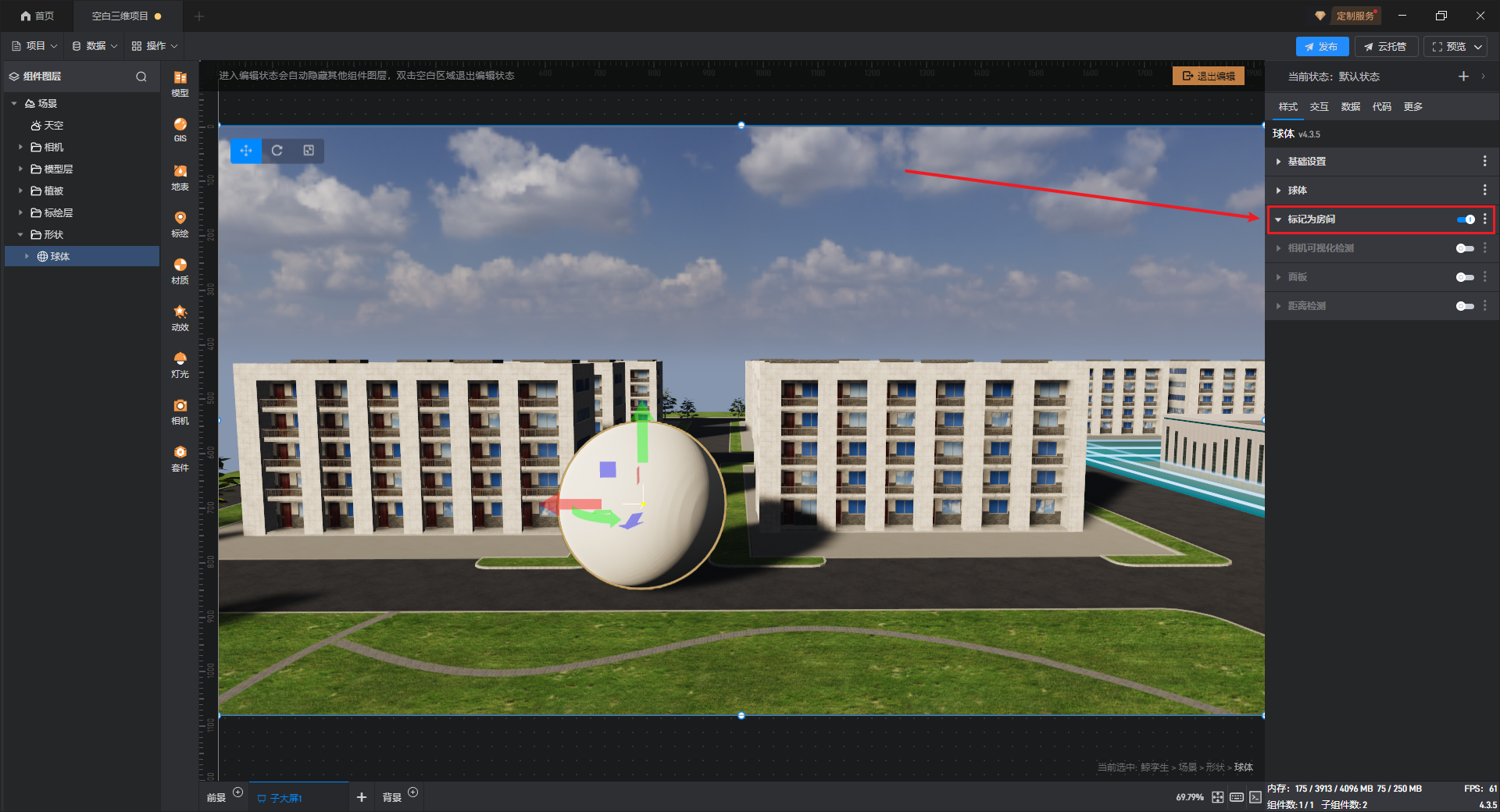
3. 标记为房间
当一个物体被标记为房间后,该物体空间内部的物体在摄像机在外部的时候是不会显示的,当摄像机进入物体内部,则物体外部的其他物体也不会显示。这个选项是一个画面性能优化的方案,特别针对有室内室外场景切换时非常适用。
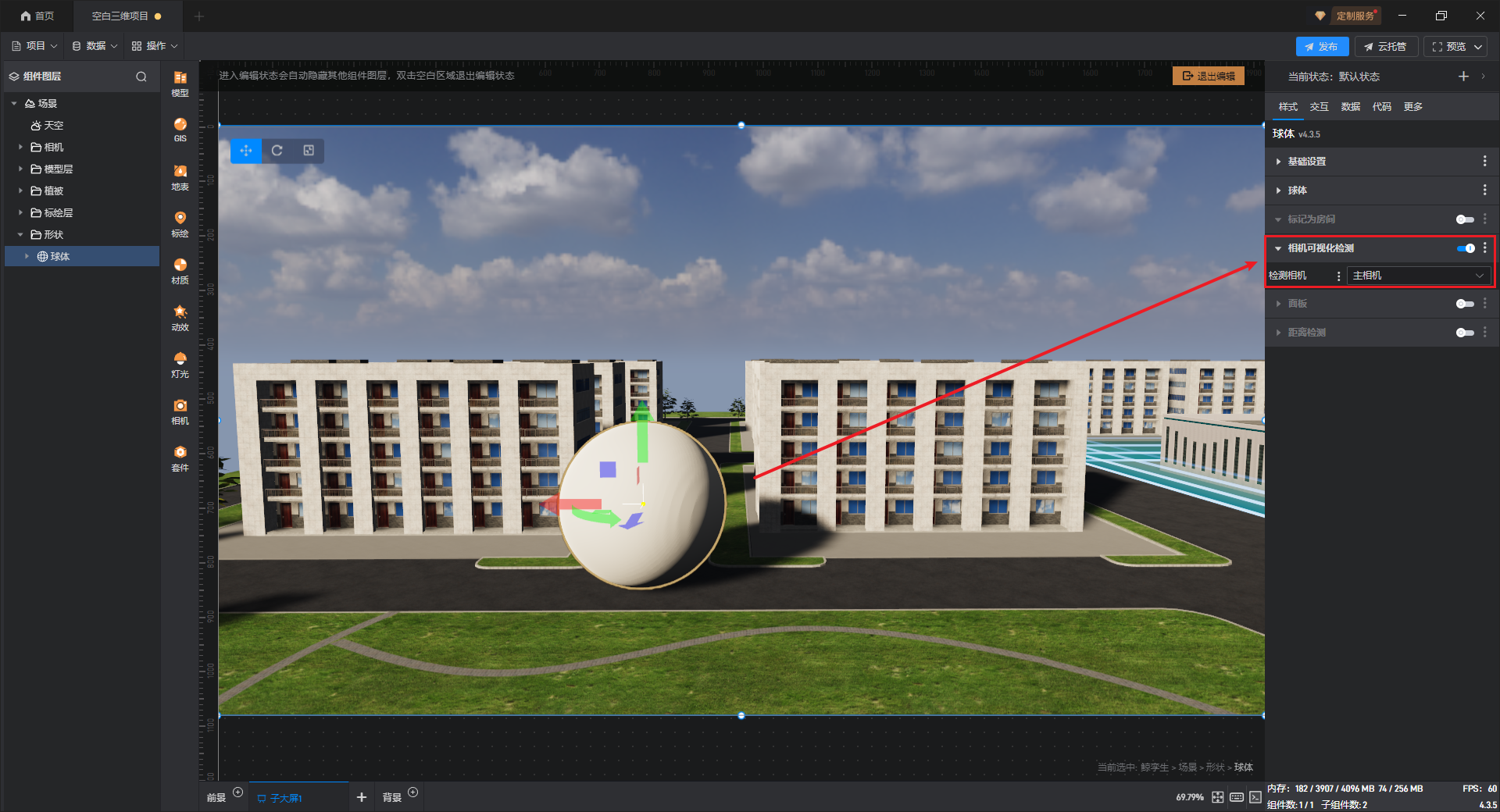
4. 相机可视化检测
开启相机可视化检测设置项,当球体进入或者离开相机可视范围时就会触发交互,从而完成预设的动作。(点击查看具体教程 →当前物体进入/离开相机可视范围)
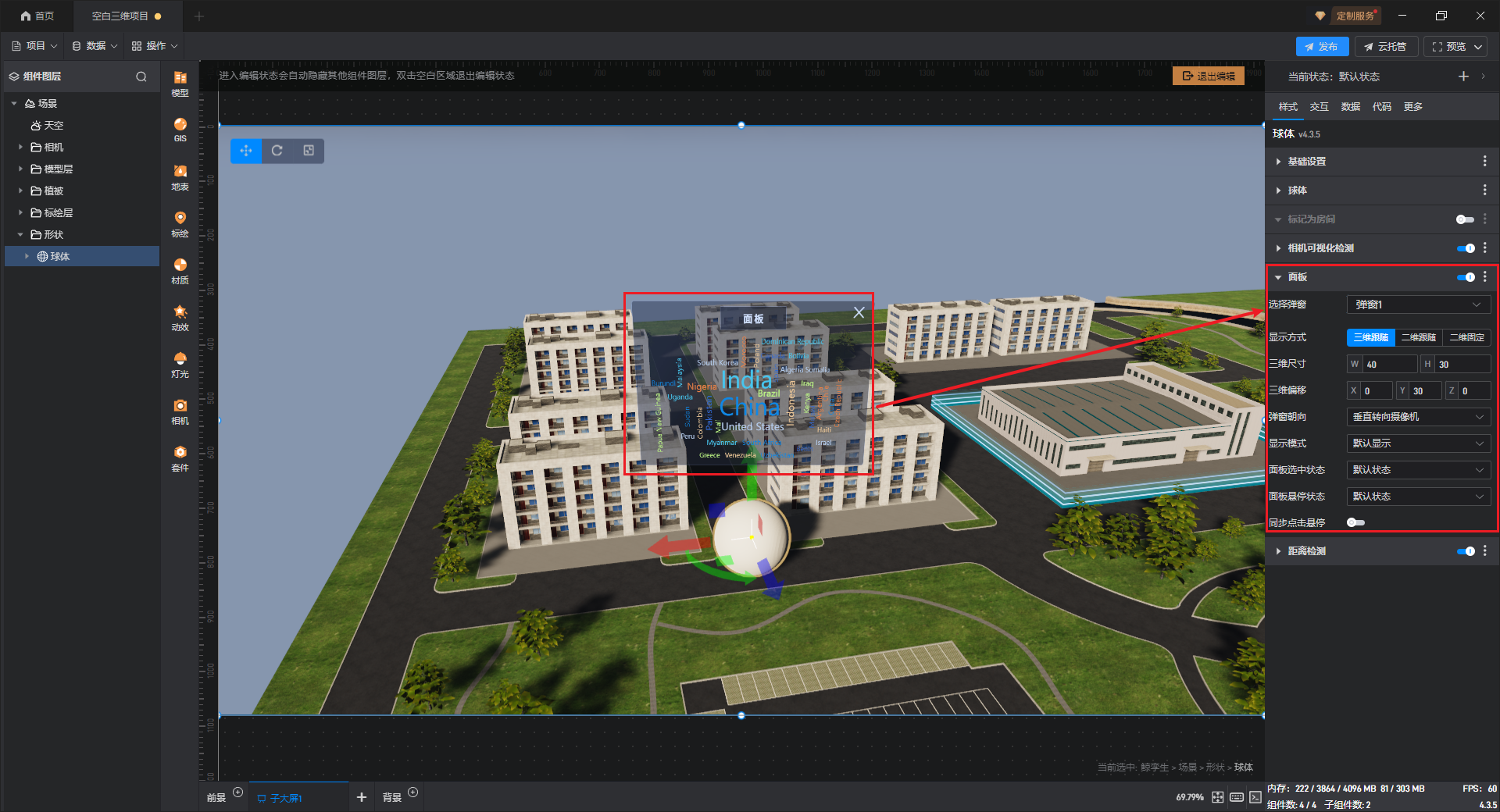
5. 面板
面板就是和该球体绑定的弹窗,面板的设置项如下:
| 配置项 | 说明 |
|---|---|
| 选择弹窗 | 自由选择看板中的弹窗组件。 |
| 显示方式 | 弹窗的显示方式,有三种方式:“三维跟随”、“二维跟随”、“二维固定”。 |
| 尺寸 | 即弹窗组件的宽度和高度,单位为px。 |
| 偏移 | 模型上的弹窗与该模型具有一定的距离,这个距离可以根据需求来设定。 |
| 弹窗朝向 | 弹窗组件面向摄像机的角度,有四种朝向:“普通”、“面朝上”、“垂直转向摄像机”和“一直面向摄像机”。 |
| 显示模式 | 弹窗显示的方式,有三种方式:“默认显示”、“悬停显示”和“点击显示”。 |
| 同步点击悬停 | 同步点击悬停默认关闭,开启后鼠标在弹窗上也能触发相应的事件。 |
6. 距离检测
距离检测指在三维场景中,计算物体和被检测物体之间的距离,以此为依据可触发交互。(点击查看具体教程 →距离检测)
